Cap. 9
![]()
AZIONAMENTO DEI ROTORI NEGLI ELICOTTERI IMBARCATI
SUI MODELLI DI NAVI DELLA MARINA MILITARE
(B. Consolidani, V. Galeani, M. Parasassi)
Dopo la pubblicazione dell’articolo sugli elicotteri imbarcati in scala 1/100 di Parasassi (pubblicato sui n° 48 e 50), i soci Consolidani e Galeani, che hanno motorizzato i rotori dei loro AB-212 imbarcati rispettivamente sul De La Penne e Etna (anche se in scala 1/72 e quindi di un 30% più grandi) hanno voluto scrivere questo articolo per invogliare gli amici a motorizzare i propri ed anche per fornire, a chi di elettronica ed elettrotecnica "… ne mangia poco …", ma è appassionato di modellismo, una semplice guida per realizzare qualcosa di veramente interessante e particolare.
L’articolo si compone di 5 paragrafi:
1 - PREMESSE
In molte navi della Marina Militare sono imbarcati diversi tipi di elicotteri, con le più svariate funzioni; riteniamo opportuno elencarne qualcuna:
Sui modelli delle navi militari realizzate in ogni parte del mondo, gli elicotteri imbarcati fanno molto effetto.
Si è visto,inoltre, per esperienza, che tali velivoli suscitano molto più entusiasmo se, anziché essere statici, sono in grado di consentire, con comandi locali o a distanza, la rotazione delle eliche di sostentamento e di direzione, come se gli stessi si apprestassero ad alzarsi in volo.
Nei paragrafi seguenti vogliamo mettere a disposizione di tutti la realizzazione di questa " magia ".
2.- TIPI DI ELICOTTERI IMBARCATI
Il primo esperimento di velivolo a decollo ed atterraggio verticale su nave militare fu forse quello effettuato nell’inverno dell’anno 1935 dall’autogiro La Cerva, spagnolo, a bordo dell’incrociatore pesante italiano FIUME ancorato nel golfo di La Spezia (v. fig.1).
Successivamente, il 2 gennaio 1944, due elicotteri del tipo Sikorsky YR-4B furono sistemati su una piattaforma di legno a bordo della nave britannica DAGHESTAN tipo " Liberty " ed effettuarono delle prove con scarso successo.
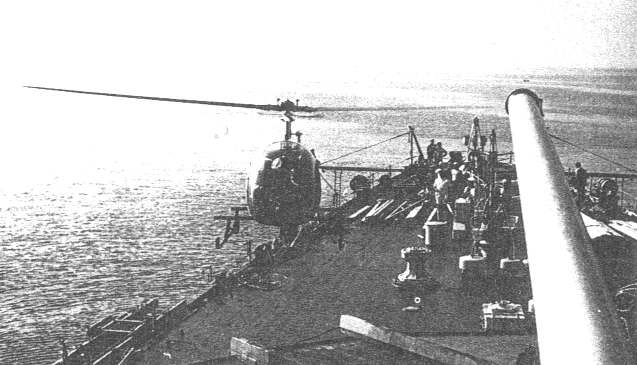
In Italia, dopo la guerra ’40-’45, nell’estate 1954 un elicottero Bell 47G (v. fig.2) effettuò prove di appontaggio e decollo a bordo dell’incrociatore GIUSEPPE GARIBALDI, nel golfo di Gaeta.
Visti gli ottimi risultati sperimentali con l’acquisto di n° 3 elicotteri del tipo di cui sopra, furono varati i progetti di n° 4 fregate classe BERGAMINI, prime unità al mondo con componente elicotteristica permanente.
Per queste navi fu adottato l’elicottero Agusta-Bell 47J-3A Super Ranger, alloggiabile in un hangar ripiegabile con sistema telescopico in quattro sezioni (v. fig. 3).
Elicotteri di maggiore importanza per gli incrociatori DUILIO e ANDREA DORIA furono i Sikorsky SH-34 (anno 1967) e gli Agusta-Bell 204.
Tutte le unità maggiori della MM a partire dagli anni ‘80, incrociatori, fregate, pattugliatori d’altura, ecc, sono dotate di uno o due elicotteri Agusta-Bell AB212ASW.
La portaerei GIUSEPPE GARIBALDI, invece, è dotata tutt’ora di elicotteri Sikorsky-Agusta SH-3D Sea King, armati con siluri a.s. MK 44 e missili aria-superficie, e elicotteri Westland EH101 oltre agli aerei McDonnell Douglas AV4-Plus a decollo verticale.
|
|
|
|
|
fig. 1 |
fig. 2 |
fig. 3 |
I modelli di navi realizzati dai soci dell’AMIREL generalmente imbarcano elicotteri biturbina tipo Agusta-Bell 212 (v. modelli Durand De La Penne, Etna e Lupo, fig.4-5-6 ), armabili con due siluri a.s. e due mitragliatrici.
|
|
|
|
|
fig. 4 (De La Penne) |
fig. 5 (Etna) |
fig. 6 (Lupo) |
3 - FUNZIONAMENTO DEGLI AZIONAMENTI
L’elicottero imbarcato AB-212, ha due motori elettrici: uno (verticale) aziona le pale di sostentamento, l’altro (orizzontale e perpendicolare) all’asse del velivolo, aziona l’elica direzionale.
Il primo è del tipo a corrente continua, tensione 1,5 Volt, corrente assorbita 25 mA, ed è installato all’interno della cabina.
Per essere più simile al vero, il motore dovrebbe girare più lentamente; questo si potrebbe ottenere inserendo in serie all’alimentazione una resistenza, ma tale sistema non avrebbe fornito la coppia motrice sufficiente a vincere l’inerzia delle pale del rotore; allora, per raggiungere lo scopo di cui sopra, il motore è stato alimentato tramite un circuito elettronico, un multivibratore (v. paragrafo 4 successivo ).
|
|
|
|
fig. 7 |
fig. 8 |
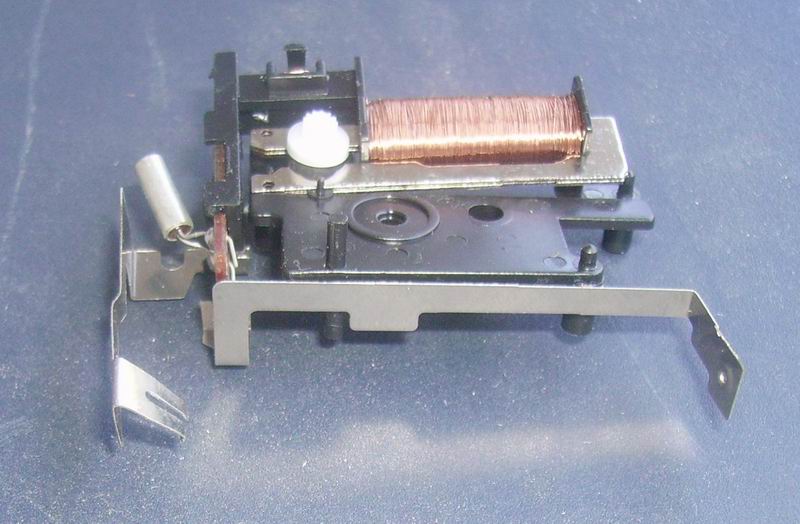
Il motore dell’elica direzionale è installato sulla coda del velivolo ed è di tipo sincrono; poiché deve essere di dimensioni ridottissime, come rotore è stato usato un nucleo magnetizzato di ferrite, di quelli che vengono adoperati per gli orologi analogici alimentati a batteria.
Da un orologio recuperiamo la parte elettrica (v. fig. 7-8) e da questa smontiamo il nucleo magnetico e la bobina; può anche essere utile tagliare dal supporto di plastica il vano cilindrico con il perno su cui ruota il nucleo. Lo statore dovremo costruircelo con una lamina di lamierino magnetico a cristalli orientati, opportunamente sagomata, tenendo conto che per problemi d’ingombro la bobina dovrà essere alloggiata all’interno della carlinga mentre il nucleo, invece, si troverà all’estremità della coda.
La. fig. 9 rappresenta la sezione di un AB212 (in scala 1/72) con evidenziate le misure e le posizioni relative dei componenti elettromeccanici.
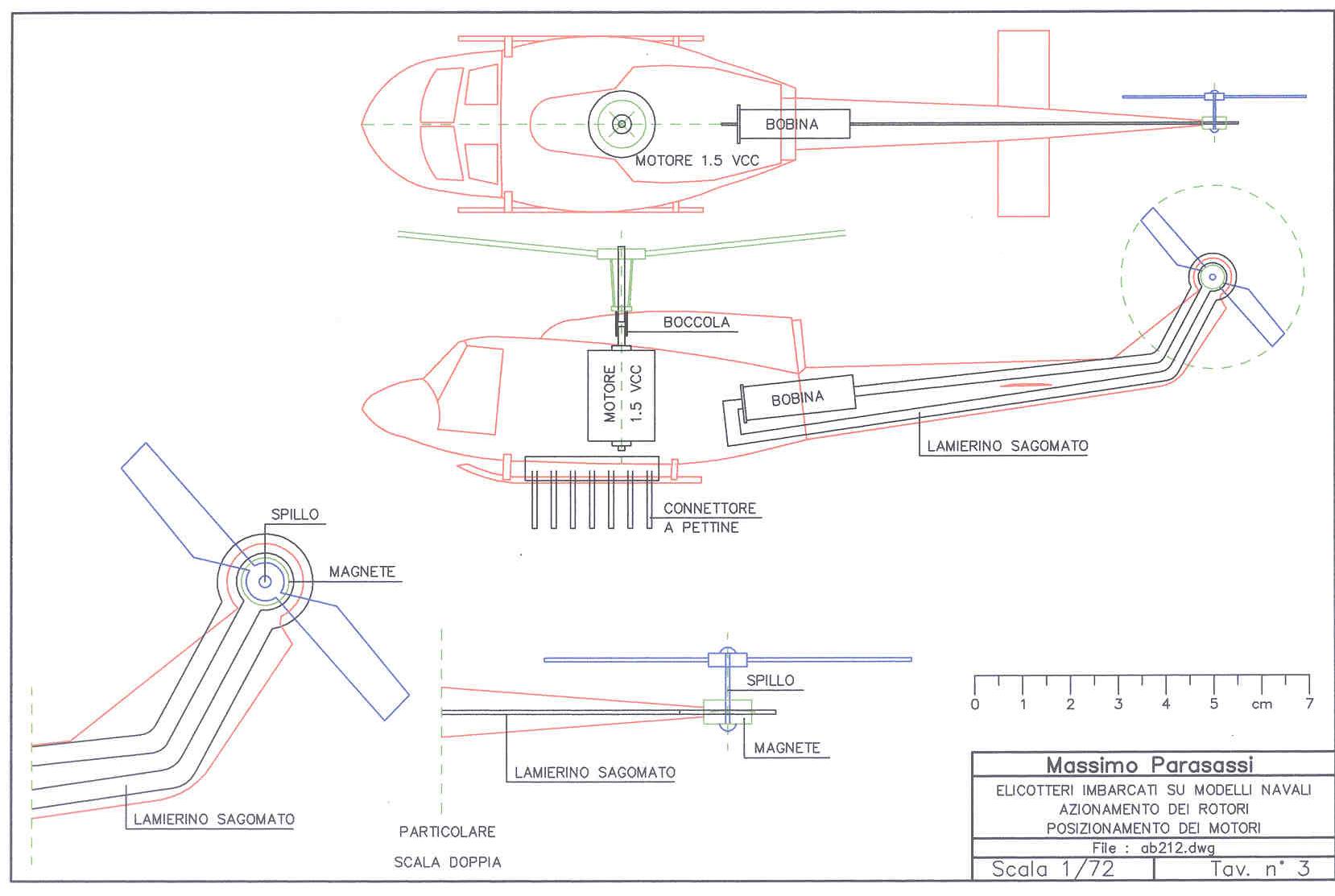
fig. 9
Inserire questi componenti nei modelli in scala 1/100 sarà più problematico perchè, essendo questi molto più piccoli e realizzati in metallo, lo spazio interno sarà più limitato e saremo costretti a lavorare molto di lima e fresa per aumentarlo, o addirittura realizzare ex novo la coda con listelli di plasticard incollati attorno allo statore; probabilmente il motore di sostentamento non entrerà nella carlinga e dovremo sistemarlo al di sotto del piano d’appoggio.
L’alimentazione della bobina è assicurata da corrente alternata generata da un inverter (v. paragrafo successivo); il consumo complessivo di questo motore è di 10 mA alla tensione di 1,5 Volt.
Con il metodo di cui sopra, l’elica direzionale gira velocissima; a questo scopo, è stato usato un piccolo accorgimento: l’asse dell’elica è stato realizzato con uno spillo su cui è stata calettata, solidale, l’elica direzionale bipala; lo spillo (asse) gira a folle all’interno del nucleo di ferrite; quest’ultimo, ruotando velocissimo in sincronismo con il campo magnetico generato dallo statore, trascina lo spillo su cui è calettata l’elica direzionale.
4 - SCHEMI E COMPONENTI
Lo schema funzionale del circuito elettronico è riportato nella fig. 10 e, come già detto, è alimentato da una batteria di tipo alcalino a 1,5 Volt.
I componenti impiegati sono:
n. 2 transistors PNP N3906
n. 7 transistors NPN 2N3904
n. 1 MOSFET BF244
n. 1 resistenza variabile 15 ohm
n. 2 resistenze 150 ohm
n. 3 resistenze 220 ohm
n. 4 resistenze 1 k ohm
n. 3 resistenze 2.2 k ohm
n. 2 resistenze 82 k ohm
n. 1 resistenze 1.1 M ohm
n. 2 condensatori 1 micro F.
n. 1 piastra per cablaggio circuiti elettronici a saldare di dimensioni cm.20x8 circa
n. 20 almeno di morsetti a pettine a saldare per effettuare le necessarie connessioni.
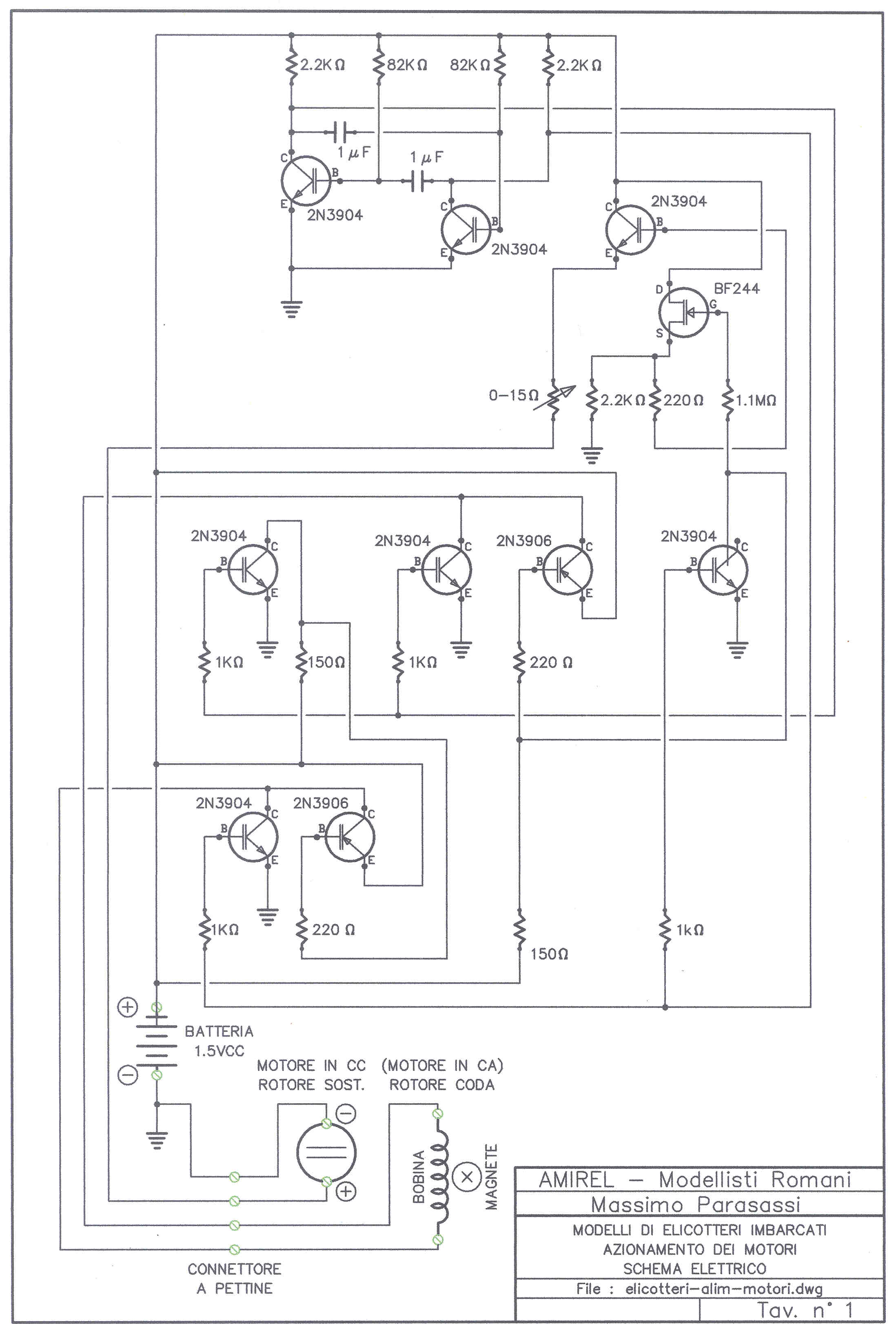
fig. 10
A completamento del Cap. 4 forniamo la fig. 11 che mostra è riportata la piastra di cablaggio dei componenti elettronici del modello dell’Etna (il circuito degli inverter è quello indicato dal contorno rosso)
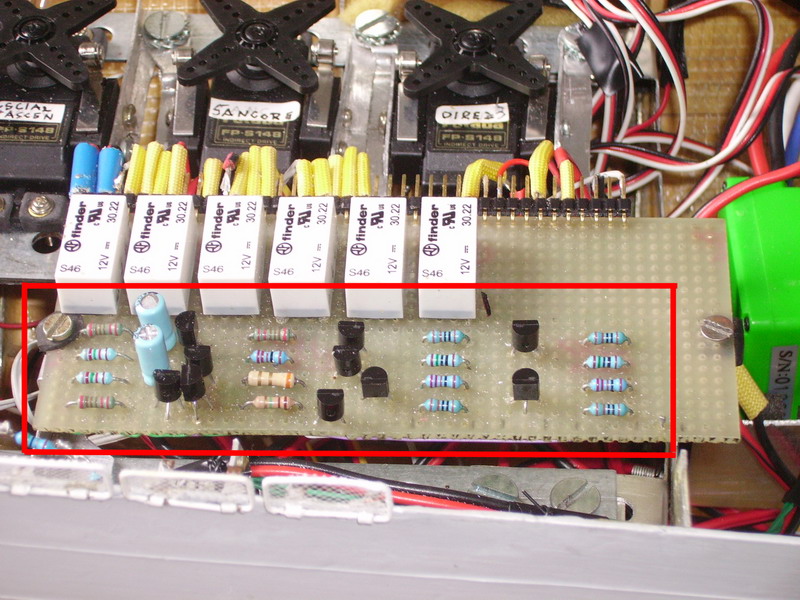
fig. 11
5 – CONCLUSIONI
Nelle fig. 12-13 vediamo i modelli dell’AB-212 del De La Penne, con i rotori in funzione, e dell’Etna; nella parte inferiore della coda dei due modelli è possibile notare il rigonfiamento (che non c’è nella realtà) dovuto al posizionamento della bobina di alimentazione del rotore.
|
|
|
|
fig. 12 |
fig. 13 |
|
|
|
|
|
fig. 14 |
fig. 15 |
fig. 16 |
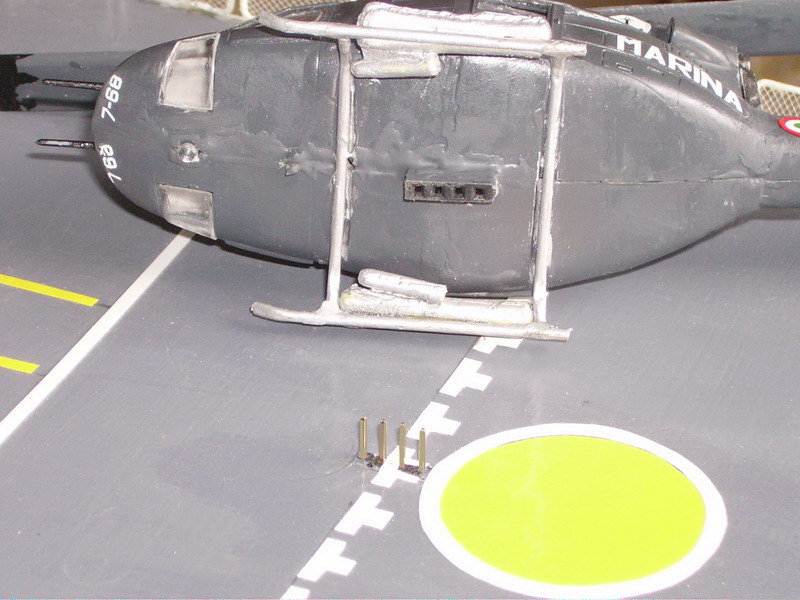
Nelle fig. 14-15 possiamo vedere i particolari dei supporti dei rotori ed in fig. 16 il pettine a 4 poli che unisce i collegamenti elettrici dell’elicottero al circuito elettronico.
Le figure che corredano l’articolo si riferiscono a modelli in scala 1/72, ad eccezione della 6 che si riferisce alla Lupo con un elicottero in scala 1/100 non motorizzato di Parasassi; il quale, se avrà tempo e deciderà di dotare la sua Lupo di un elicottero con i rotori funzionanti, vi potrà allora illustrare come sarà riuscito a conciliare gli ingombri della meccanica con un modello in scala 1/100.
Concludiamo l’articolo sperando di essere stati comprensibili ed esaustivi e soprattutto di aver invogliato qualcuno a seguirci nel lavoro; comunque siamo sempre a disposizione per eventuali chiarimenti e delucidazioni.
Bernardino, Massimo, Vincenzo
Articolo pubblicato in 3 parti sui NOTIZIARI n° 51-52-53
![]()